Description
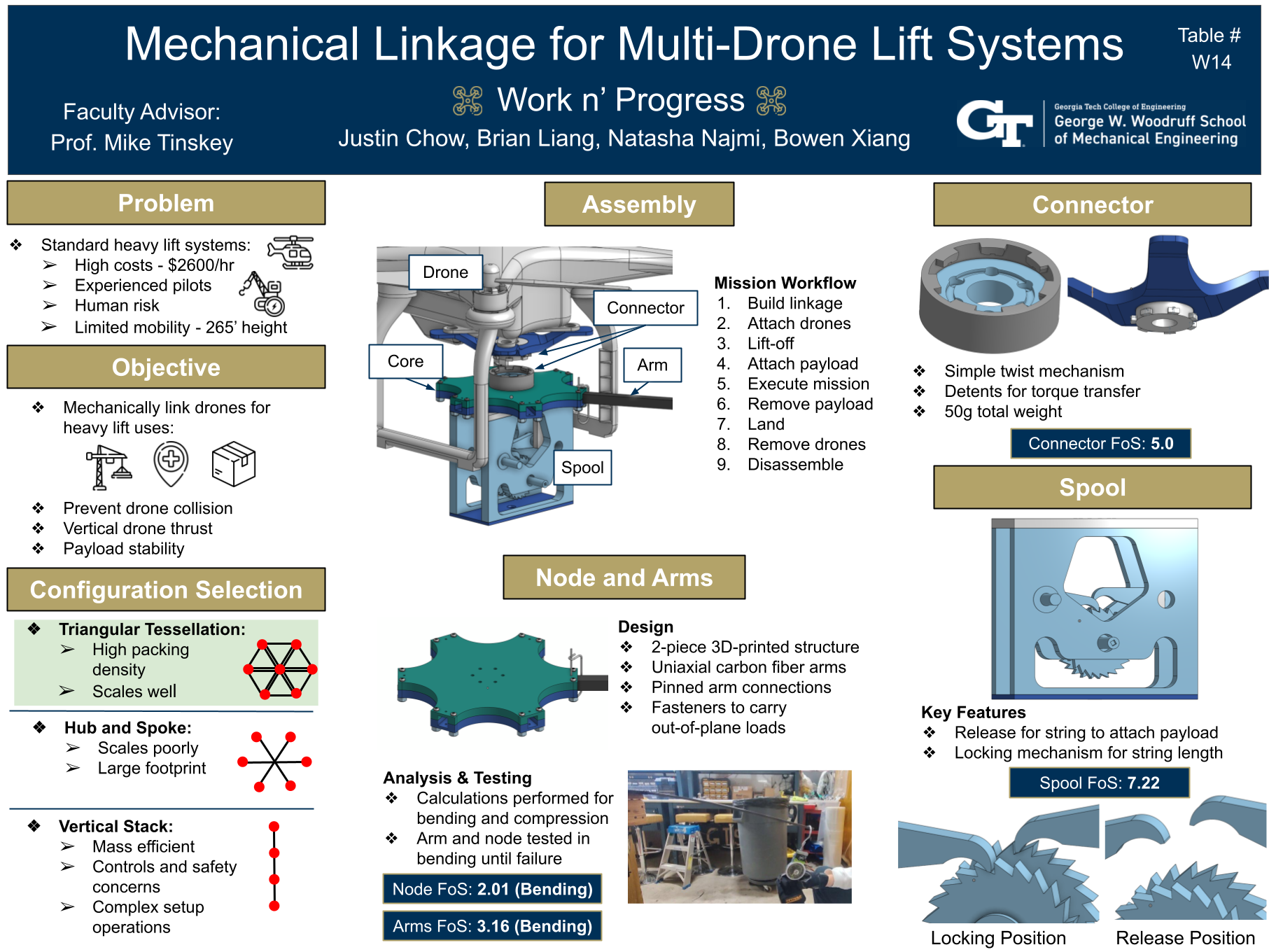
Traditional heavy lift applications are often too expensive to operate or maintain, slow to respond, or not flexible enough to reach remote environments.
Drones can fill that gap in the market between traditional heavy lift solutions in construction, search and rescue, delivery, and various heavy lift industries. But still, they often do not have the necessary payload capacity to perform helpful lifts.
Our project interfaces with this problem by introducing a mechanical linkage between a swarm of drones to allow for the efficient and easy use of multiple drones to cooperatively lift a heavy payload without having to waste energy maintaining separation between drones within a swarm.