Description
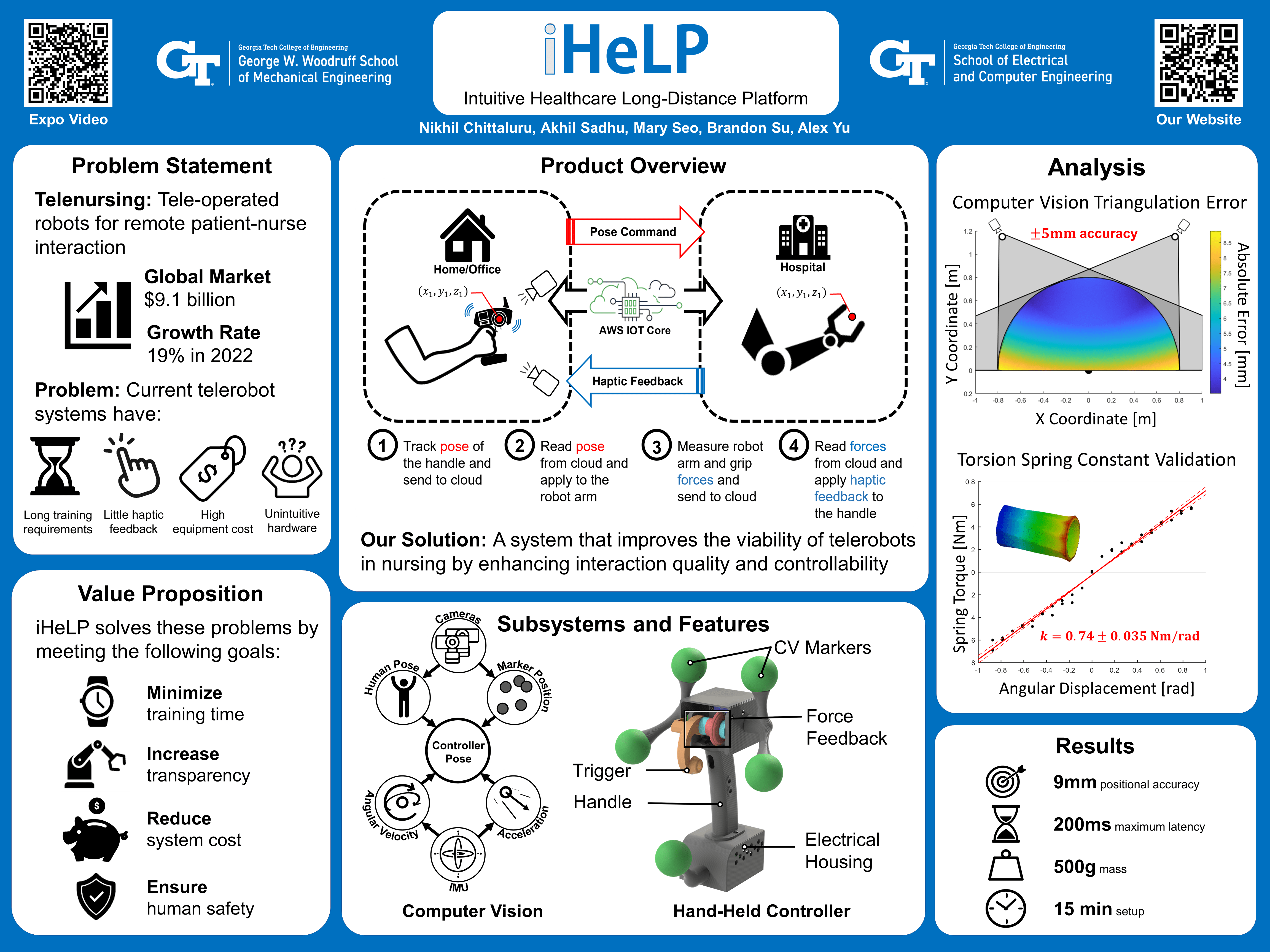
The goal of this project is to create a tele-operated controller for a robot arm that is easy to learn and use. This controller will primarily use the position and orientation of the user’s hand to manipulate the robot arm. By using the user’s hand as the input, it will be more intuitive for the user to manipulate the arm and interact with the surrounding environment. This will enable nurses to operate robots comfortably, increasing the viability of the telenursing industry.