Description
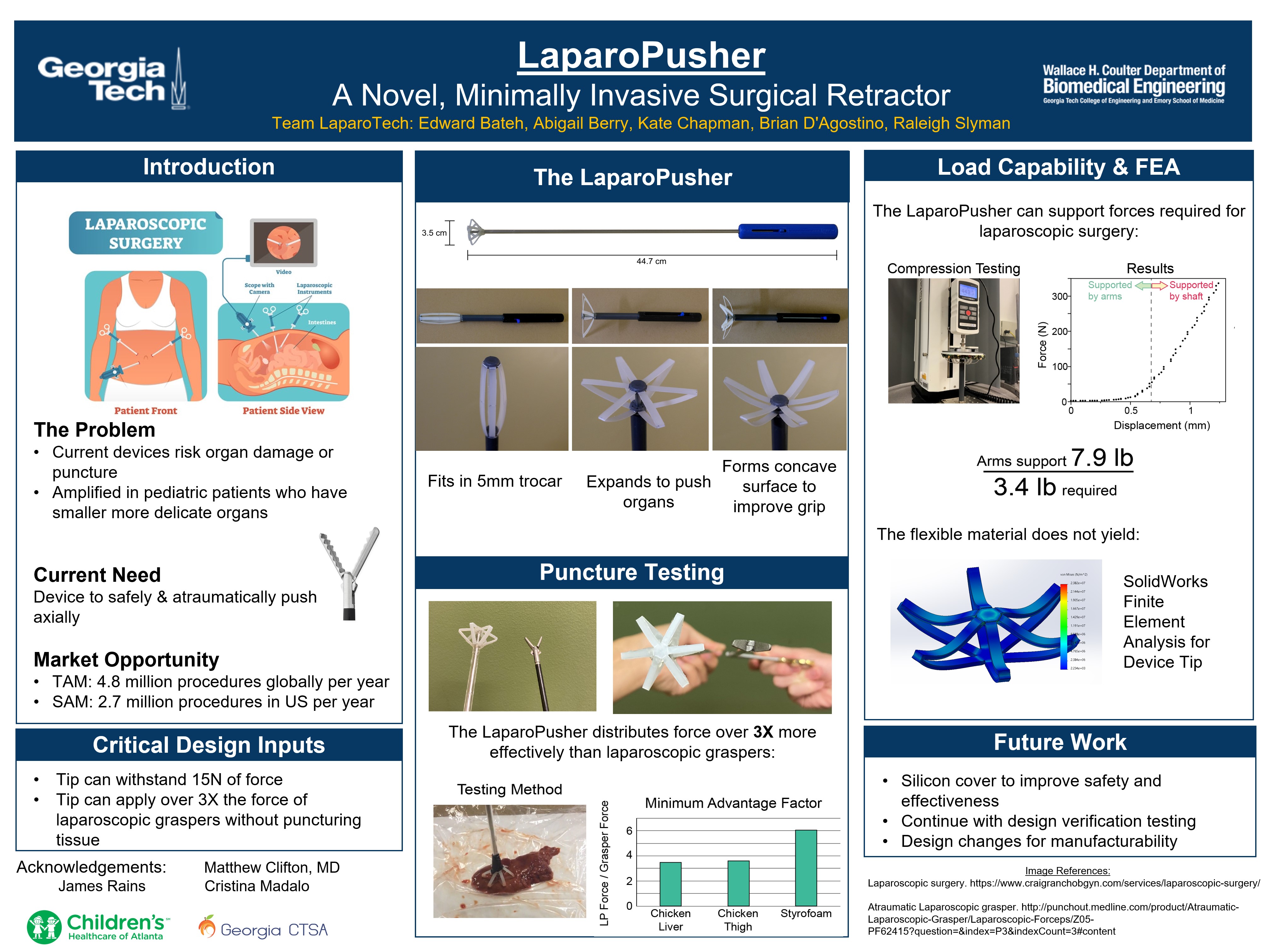
Laparoscopic procedures utilize small incisions to access the abdomen with minimal damage to the abdominal wall. During these procedures, instruments are used to manipulate tissue to access organs of interest. While current instruments are able to manipulate tissue laterally and retract it up into the abdominal cavity, instruments are not able to apply atraumatic forces to push organs towards the posterior abdomen. Thus, this project is aimed at developing a device that can push organs in line with the instrument shaft.